EV charging for Self-driving Fleets: Webinar with Darren Hau
.png)
In this second installment of our webinar series on Interoperability in the US, eDRV spoke with Darren Hau of autonomous vehicle startup Cruise. The discussion turned to the challenges of keeping a self driving fleet charged and the importance of data sharing for the interoperability of EV charging infrastructure. Read on for a brief summary of the webinar or watch the replay on our Youtube channel here.
Cruise is known for being among the first fully electric and fully autonomous rideshare company in the world. By February 2023 the company had already passed 1 million driverless miles and had fleets across many major metro areas in the US, including San Francisco, Austin and Phoenix.
Darren Hau heads the Fleet Infra Ops team and Fleet Infra Engineering team at Cruise and has seen the wide gamut of opportunities and challenges when it comes to keeping the companies fleet charged and on the road. We started by asking him the charging journey of a self-driving car.
How do Cruise robotaxis get charged?
Hau told us that the state of charge of an autonomous car is monitored through their own fleet telematics systems; a tool they affectionately call Starfleet. “We can see the EVs and what state they’re in. When they reach a certain level of state-of-charge, we call them back for charging.”
Cruise uses purpose built fleet depots and does not currently use public or shared charging infrastructure. These depots are not just for charging but also for maintenance and data-offloading. The AV drops off its last customer, goes back to the depot where the backend tooling lets staff know which stall and connector the AV is going to use and is eventually charged by a staff member.
What are the challenges of Fleet Depot charging?
Fleet depot charging comes with its challenges. For example, one challenge that Starfleet faces is working with a base model car (the Chevrolet Bolt) that is not custom-built for autonomy so they have had to install their own computer or sensor platforms on there which can service some of the info but not all that would be ideal.
There is also the problem when having to resort to some public charging infrastructure. “We do have to leverage some of the public charging in some of the newer markets,” Hau said “That’s where roaming or lack thereof becomes a challenge. Right now we have to get RFID cards or download an app or have a litany of accounts. It does become a little painful for us.”
There are also challenges as to interoperability. The question primarily is how to get vehicles to talk with the charging infrastructure. “This is what eDRV does.” Hau said, “How do we get OCPP be a standard and not just be guidance? How do we implement ISO 15118 or Plug&Charge? Those are challenges we don’t want to deal with as a fleet so we’re trying to make sure that it’s as seamless as possible from our providers.”
Has moving to the North American Charging Standard (NACS) changed anything for Cruise’s charging strategy?
“Moving to NACS is a good development.” Hau said in our webinar, “It’s going to improve the experience for everyone. We’re looking for GMs guidance on this one and we’d prefer to use it sooner rather than later as it gives us access to public charging if we need it.”
Hau also noted that the move to NACS could lead to potentially cheaper hardware as well as a more lightweight and sturdier connector than CCS.
How does Cruise position its fleet depots?
Cruise has expanded aggressively since it was first founded in 2013 and this has brought its own challenges.
“Cruise makes life hard for itself by positioning itself in major dense metros where there are demands on land and power.” Hau told us, adding that “there are lots of tools that let you know where the optimal place is for a charging site.”
The company sends teams that go out and scout hundreds of locations for sites that are cost effective have enough access to power.Their needs include up to 40 chargers at a location with 3-6 megawatts of power.
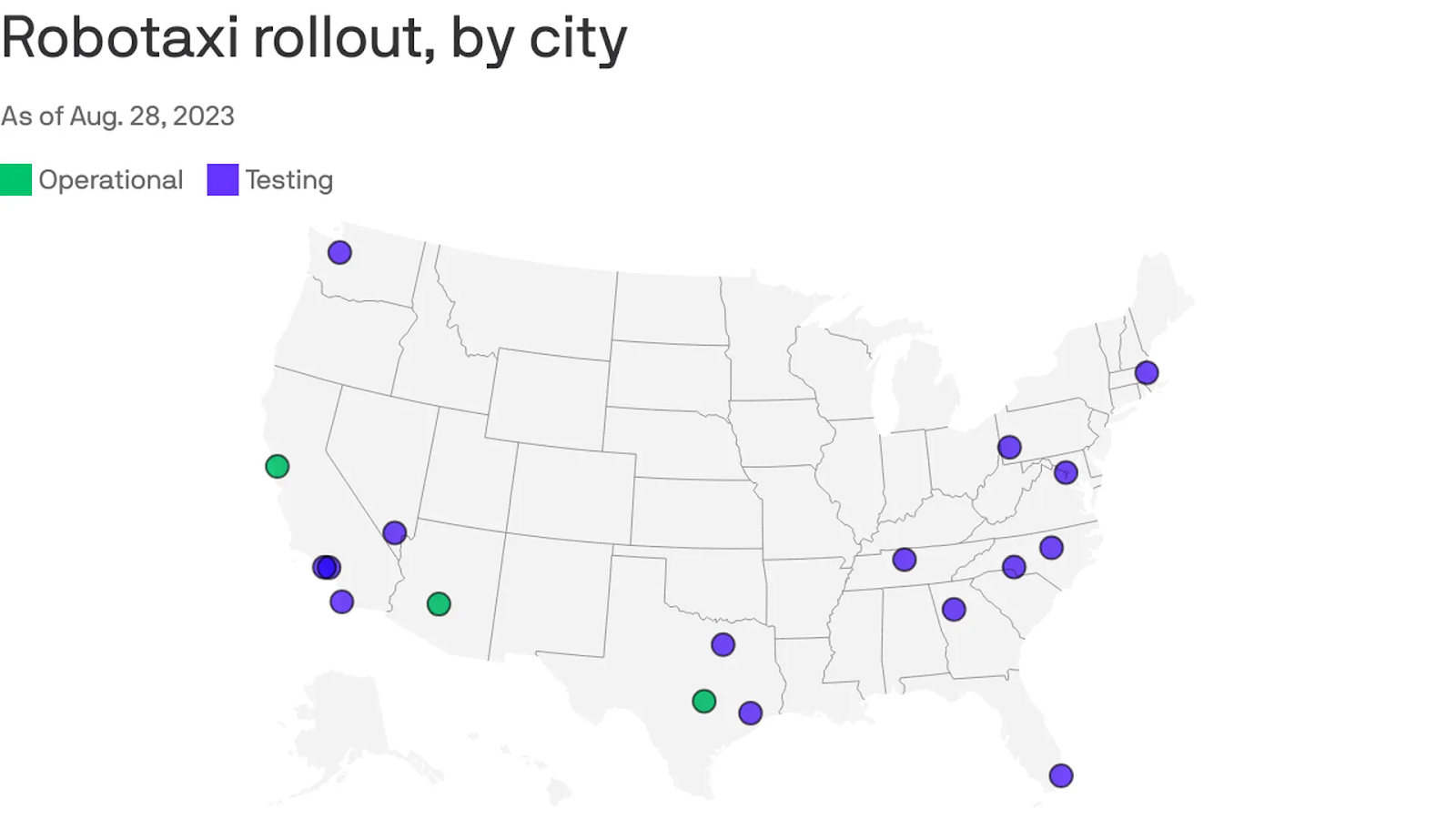
“We started in San Francisco because it’s one of the hardest markets to be in.” Hau said. They have since expanded and are in various cities in Texas, Washington and North Carolina (see map below).
The question in the end is about finding a good balance between need and speed. “How can we move as quickly as we can, while being cognizant that Cruise is a tech forward company?” Hau asked, “Striking that balance between being early and retaining that flexibility is the biggest challenge for us.”
What’s the ideal uptime you look for in infrastructure?
As with all companies, Cruise is looking to push for as close to 100% uptime as possible. This is major steps from the past where Hau mentioned that the infrastructure was at around 80%. Getting to excellent uptime called for a better strategy where Cruise sought service providers and an internal team to push for this result.
“We do take responsibility for our uptime but we just don’t staff it all internally.” Hau said. “It’s a Sisyphan task of pushing a boulder up a hill. Now we are being more proactive and working with technicians and other staff to ensure that the hardware just fails less. Hau noted that good execution and the tooling to enable that are vital for excellent uptime and they push their providers to take ownership over this.
How important is data sharing and transparency for better uptime?
Data, Hau noted, is something people want to protect but not share. “If you can’t use that data then you’re largely paying for storage costs. What we’d like to see the industry do is find a productive way to share data to serve the end customer as well as share the benefits of a better customer experience…I don’t see enough people talking about sharing and data transparency between charger and charger service provider.”
One example Hau used is getting an OCPP error message which tells you what but not why the error happened. “It would be great to get a standard way of getting information from chargers themselves about what they’re seeing during a session.” This allows service providers the ability of doing a faster job of closing that loop and resolving the issue.
For Cruise, the most important data points currently include the real time status of a vehicle where they can establish whether fleet vehicles are available, operational, currently charging or which chargers it can use. Cruise also needs historical insights from charging sessions so they can learn from fleet energy use to make better business decisions.
There are also data points that can help better understand the vehicle. “Folks who work with electric fleets usually focus on state of charge, where the vehicle is located and when it arrives back to the depot. That’s not the hard part as there are many native tools to service things like charging optimization. But to go further to understand battery degradation or predictive maintenance then you will have more info that may not be serviced by those tools.”
To this end, Hau noted that APIs are really important when they want to build data pipelines. “eDRV is easy to use and has great documentation,” Hau said, adding that “It makes things easier to pull things into our backend so we don’t spend too much time on it.”

.png)
.jpg)